Xiaozhou Xin, Liwu Liu, Yanju Liu, Jinsong Leng Advanced Functional Materials, 2021, 2107795.
Mechanical metamaterials are artificial materials consisting of periodic optimized microstructures, which gain their extraordinary mechanical properties from structure rather than composition, such as auxetic behavior, negative thermal expansion, negative stiffness, and reconfigurability, etc. The tension-torsion coupling metamaterial (TTCM) exhibits torsional deformation while stretching, with the degree of freedom exceeding the Cauchy elasticity. However, the TTCM suffers from the limitations of the weak tension-torsion coupling effect (TTCE), narrow deformation domain, and lack of adaptability. To break through these limitations of the TTCM, in this work, we proposed a novel strategy combining bio-inspired design and 4D printing. Inspired by the array mode of hedgehog spines, the pixel mechanical metamaterial (PMM) was developed by the array of uncoupled constrained individuals (i.e., mechanical pixel, MP), which exhibited a great degree of design freedom, modularity and diversity of configuration/mechanical properties. Similar to adjusting the screen image by pixel colors, the pixel mechanical metamaterial adjusted mechanical properties by changing the configuration of the mechanical pixel. The helix-shaped collagen fibers in the biological tissue undergo the deformation mode from the bending-dominant to the stretching-dominant. The helical ligament inspired by the configuration and deformation mechanism of the collagen fibers was introduced into a 3D chiral TTCM, and the highly coupled DOFs in the TTCM were removed to obtain the MP with TTCE.
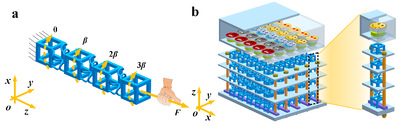
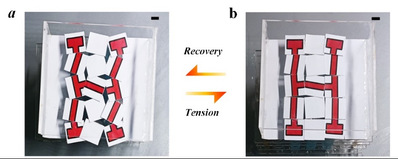
Figure 1 (a) The CAD models of the MP; (b) A modular, programmable and reconfigurable PMM is composed of several MPs with TTCE and a frame. The torsion angle and direction of the MP can be adjusted by changing geometric parameters and chiral modes of the MPs. The MPs with different chiral modes were arranged periodically to fabricate an information encryption device (Fig. 2a). When the device was heated and mechanically deformed, the torsion of the mechanical pixels enabled the information transform from encrypted state to decrypted state (i.e. “H”), and the image could be fixed in this decrypted state after cooling the device(Fig. 2b). Then the device was reheated, and the image recovered to the encrypted state (Fig. 2a).
Figure 2 The information encryption device: (a) encrypted state (b) decrypted state. The ligament configuration and node spacing of mechanical pixels created an opportunity for the fabrication of buffer devices. During impact, the node spacing allowed the ligament to deform in a large space, thus providing sufficient buffer for the fragile objects. Due to the shape memory characteristics, the node spacing and configuration of mechanical pixels in the buffer device can be adjusted to achieve different buffer effects. For example, the egg fell from a height of 500 mm on the programmed buffer device and broke immediately (Fig. 3a), while the egg remained intact when it fell from 1000 mm to the unprogrammed buffer device (Fig. 3b).
Figure 3 The dynamic impact experiments of the eggs freely falling to the buffer device: (a) programmed state (b) unprogrammed state. |